


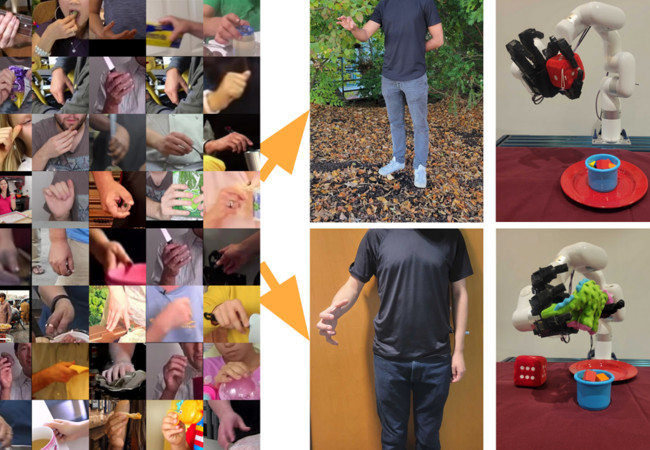

Investigadores de la Universidad de Carnegie Mellon han creado un sistema que le permite a un ser humano controlar un brazo robótico mostrando a una cámara el movimiento que quiere realizar. Deepka Pathak, uno de los investigadores del proyecto, ha destacado que en trabajos anteriores se han empleado guantes, marcadores de movimiento o un sistema con varias cámaras. El nuevo modelo utiliza una sola cámara sin necesidad alguna de calibración. El usuario puede ubicarse en cualquier sitio y aún así controlar el robot eficazmente.
De dos a tres dimensiones
El sistema convierte los movimientos que observa en una serie de instrucciones para los movimientos del robot. Como el lector seguramente notará las imágenes están en 2 dimensiones, los movimientos deben realizarse en 3 dimensiones. Esta capacidad de interpretación es quizás uno de los aspectos más notables del desarrollo.

Un desafío importante en el desarrollo fue compensar la diferencia que existe en tamaño y forma entre una mano humana y una mano de robot. Para tal fin era necesario entrenar al sistema en la adaptación de estos movimientos.
La recolección del extenso corpus de material para el entrenamiento podría haber supuesto un enorme costo, sin embargo los investigadores recurrieron a este basto y a veces caótico repositorio que es Internet. En particular, YouTube. El modelo fue entrenado con una serie de videos en la que seres humanos realizaban operaciones diarias con diferentes objetos.
Objetivos y resultados
Los resultados hasta el momento han sido más que prometedores. El sistema le permite a una persona controlar un brazo mecánico con gran habilidad aún sin recibir entrenamiento previo. Los desarrolladores han calificado al modelo como telequinesis robótica.
El objetivo es el control de unidades robóticas en espacio cotidianos así como también en ambientes inaccesibles e inhóspitos.