




El Instituto Italiano de Tecnología ha presentado un dispositivo bastante interesante, un robot humanoide volador.
El objetivo del equipo es que el ingenio opere en escenarios de desastres y sea capaz de rescatar a los sobrevivientes atrapados en los escombros de los edificios, o llegar a lugares aislados por inundaciones e incendios.
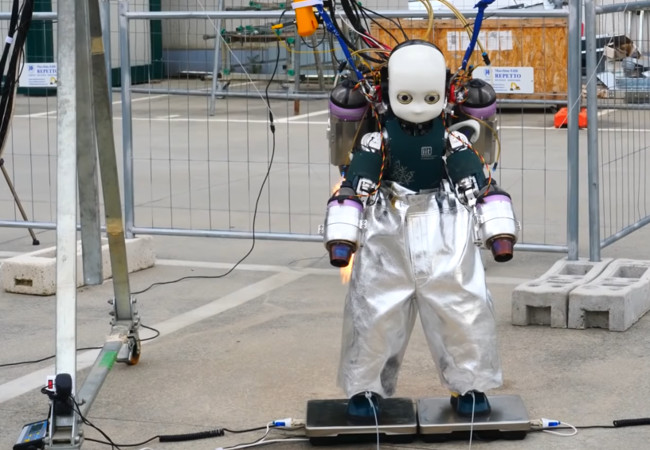
El sistema de vuelo fue aplicado a un robot conocido como iCub, desarrollado anteriormente por el mismo instituto.
Pero el desafío no fue simplemente ponerle propulsores a un robot, sino desarrollar un sistema de control que permita que este se mueva de forma eficiente y segura por el aire. Curiosamente el trabajo realizado por los investigadores italianos es uno de los primeros en esta área, posiblemente el primero de todos.
Mecanismo
El iCub utiliza dos fuentes de información para controlar sus movimientos. Datos tomados del motor jet en una cámara de pruebas, y datos de como el conjunto de impulsos del robot afectan su centro de gravedad.
La combinación es fundamental dado que el motor jet puede desempeñarse de una forma distinta según diferentes factores de movimiento y el cálculo del centro de gravedad del robot no considera al impulso del motor. El esquema implementado por los desarrolladores italianos permite superar estas deficiencias.
Un nuevo robot volador
Para evaluar la efectividad del sistema se creó una versión mejorada del iCub, el IronCub, que curiosamente es más sencillo y económico que el original. En este modelo los motores han sido integrados.
Aunque todavía queda mucho por pulir y mejorar, el equipo tiene grandes expectativas.






[…] entrada Investigadores italianos crean robot volador aparece primero en […]